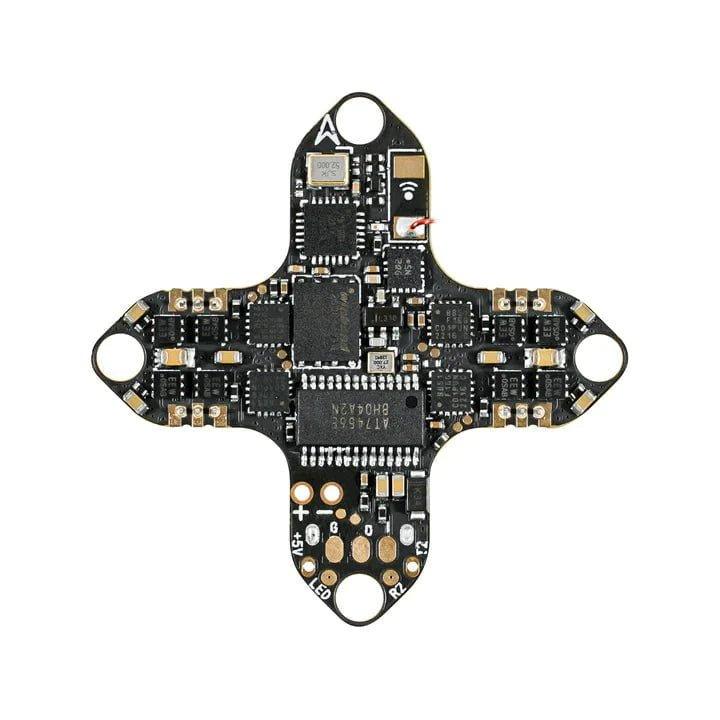
Le contrôleur de vol sans balais Air Brushless, le premier FC 1S qui utilise le STM32G473CEU6, a connu une augmentation remarquable de 55 % de la vitesse de calcul et des temps de réponse ultra-rapides, surpassant le F411. Équipé du gyroscope ICM42688P leader du secteur et d'un VTX 5,8 G 25 mw ~ 400 mw intégré, il offre à la fois les versions 4 en 1 avec 2,9 g et 5 en 1 avec 3,6 g, ce qui porte la posture et le mouvement de votre drone avec précision à un niveau supérieur. Plongez sans effort dans le monde des drones du contrôle du bout des doigts. Une valeur inégalée et une supériorité indéniable avec lui, laissez la plupart de la concurrence dans la poussière. Ce sera le choix avancé pour les futurs drones whoop 1S ultralégers !

Remarque : BETAFPV est extrêmement reconnaissant à cette équipe de test comprenant « Don Johnson, Tokyo_Dom, BLACKHORSE, wKich, Travis, Ciotti FPV, Tdog, Anthony Knight, Issac, Albert, sub250g, Tyranttfpv, Wk Breeze » pour leurs précieuses idées dans la conception de ce contrôleur de vol sans balais à air.
Attention
- Puissance VTX : une puissance VTX plus élevée consomme plus d'énergie et génère plus de chaleur, réduisant ainsi le temps de vol. Pour une meilleure durée de vol dans les scénarios en intérieur, utilisez une puissance de 25 à 100 mW.
- La puissance calibrée mesurée après stabilisation de la température (condition de stabilisation : plus de 60 secondes après la mise sous tension du contrôleur de vol) est la suivante : lorsqu'elle est réglée sur 25 mW, la puissance de sortie est comprise entre 14 dBm ± 0,8 dBm (21 mW à 30 mW), ce qui correspond à la norme normale. Voici les données de test du 5IN1 Air FC avec le VTX réglé sur 25 mW, les données de puissance sont testées à différents moments sur les points de fréquence R1, R3, R5 et R7.

- La version 4IN1 Air FC V1.1 a déjà résolu le problème d'anomalie de puissance de sortie VTX.
- Câblage du moteur : seule la soudure est prise en charge pour le câblage du moteur sur la commande de vol. Veillez à ce que la température du fer à souder soit maintenue en dessous de 370 ℃ et limitez la durée de soudure à 1 à 2 secondes.
Puce
- Air Brushless Flight Controller, le premier FC 1S qui utilise le processeur G473, a connu une augmentation remarquable de 55 % de la vitesse de calcul et des temps de réponse ultra-rapides pour des courses précises et des manœuvres de freestyle complexes, surpassant le F411.
- Intégration supérieure mais conception plus légère, avec puce OSD miniature personnalisée. Pesant seulement 2,9 g (version 4 en 1) ou 3,6 g (version 5 en 1), il offre des options de port UART supplémentaires pour des extensions de fonctions sans effort, s'adaptant parfaitement à n'importe quel scénario de vol.
- VTX 25-400 mW intégré par défaut. L'installation simplifiée permet de gagner de la place, de réduire le poids et d'améliorer la commodité des réglages VTX et FC. La version 5IN1 intègre même le RX série ELRS 2.4G.
- Améliorez la précision de votre drone avec le gyroscope ICM42688P, leader du secteur, l'accéléromètre intégré, l'étalonnage des capteurs de pointe, les algorithmes de filtrage et une fréquence d'échantillonnage allant jusqu'à 8K, qui amènent la posture et le mouvement précis du drone au niveau supérieur.
- Bénéficiez d'un enregistrement et d'une analyse complets des données de vol avec une impressionnante boîte noire d'une capacité allant jusqu'à 16 Mo. Optimisez les performances et diagnostiquez efficacement les pannes, en exploitant tout le potentiel de votre drone.

Spécification du FC
- Poids : 2,9 g (version 4 en 1) / 3,6 g (version 5 en 1)
- Taille du trou de montage : 26 mm x 26 mm
- Processeur* : STM32G473CEU6 (168 MHz)
- Six axes : ICM42688P (connexion SPI)
- Mémoire de la boîte noire : 16 Mo
- Capteur : tension et courant
- 5V BEC*: 5V 3A
- Port USB : SH1.0 4 broches
- ESC intégré avec 5 A continu
- RX : Série ELRS 2.4G (V3.4.3) (uniquement version 5IN1)
- Version 4 en 1 : FC+ESC+OSD+VTX
- Version 5 en 1 : FC + ESC + OSD + VTX + RX
Spécifications de l'ESC
- Tension d'entrée : 1S
- Version du micrologiciel FC : Betaflight_4.5.0_BETAFPVG473
- Micrologiciel ESC : A_X_5_96KHz_V0.19.hex pour le matériel BB51 Bluejay
- Prise en charge des signaux : D-shot300, D-shot600
Spécifications du VTX
- Puissance de sortie : 25/100/200/400/PIT
- Fréquence : 5,8 GHz 48 canaux, avec Raceband : 5658~5917 MHz
- Sélection de canal : SmartAudio2.0
- Type de modulation : FM
- Contrôle de fréquence : PLL
- Toutes les harmoniques : Max -50 dBm
- Stabilité de fréquence : ±100 kHz (typ.)
- Précision de fréquence : ±200 kHz (typ.)
- Erreur de porteuse de canal : ±1,5 dB
- Port d'antenne : 50 Ω
- Température de fonctionnement : -10℃~+80℃
Diagramme
Vous trouverez ci-dessous le schéma du contrôleur de vol Air Brushless (version 4 en 1).
Vous trouverez ci-dessous le schéma du contrôleur de vol Air Brushless (version 5 en 1).
Comparaison entre G473 et F411
Dites adieu aux limitations et adoptez la technologie de pointe du contrôleur de vol G473 pour une expérience de vol inégalée. Le contrôleur de vol sans balais Air est doté d'une vitesse d'horloge CPU supérieure jusqu'à 168 MHz et de 4 ports série plus riches, permettant des temps de réponse ultra-rapides et une puissance de calcul avancée, ce qui le rend idéal pour les vols exigeants, ce qui fait passer votre expérience de vol au niveau supérieur et démontre des performances exceptionnelles, surpassant toutes les options FC 1S disponibles sur le marché à l'heure actuelle.
4 EN 1 et 5 EN 1
Choisissez ce contrôleur de vol sans balais à intégration supérieure, pour une installation ultra-légère en 1S, adaptée aux besoins des pilotes exigeants. Il est intégré par défaut à un VTX 25-400 mW, la version 5 en 1 qui intègre FC+ESC+OSD+VTX+RX va encore plus loin en intégrant le RX série ELRS 2,4 G, simplifiant l'installation pour économiser de l'espace et réduire le poids, et améliorant la commodité des réglages VTX et FC. La version 4 en 1 supprime le port RX pour plus de polyvalence, offrant aux pilotes davantage d'options RX externes.
Récepteur série ELRS 2,4 G
Le récepteur série ELRS 2.4G utilise le protocole série Crossfire (protocole CRSF) pour communiquer entre le récepteur et la carte du contrôleur de vol. Le récepteur série ELRS 2.4G est donc disponible pour prendre en charge la mise à niveau vers ELRS V3.0 sans avoir à flasher le micrologiciel du contrôleur de vol Betaflight. Entrez l'état de liaison en allumant/éteignant trois fois.
- Branchez et débranchez le contrôleur de vol trois fois ;
- Assurez-vous que la LED RX effectue un double clignotement rapide, ce qui indique que le récepteur est en mode liaison ;
- Assurez-vous que le module RF TX ou l’émetteur radio entre en état de liaison, ce qui envoie une impulsion de liaison ;
- Si le récepteur a une lumière fixe, il est lié.
Le RX série ELRS 2.4G peut être mis à jour via Wi-Fi ou via un relais série Betaflight. Voici la méthode pour mettre à jour le firmware du RX série ELRS 2.4G via un relais.
- Branchez votre FC sur votre ordinateur, mais NE vous connectez PAS au configurateur Betaflight ;
- Choisissez la cible « BETAFPV 2.4GHz AIO RX » ;
- Flash utilisant l'option Passthrough Betaflight dans ExpressLRS Configurator.
Comment flasher le firmware via Wi-Fi ici.
Micrologiciel et interface de ligne de commande Betaflight
Les développeurs officiels de Betaflight recommandent d'utiliser la version 42688 du gyroscope, et de nombreux problèmes avec ICM42688 ont été corrigés dans la version 4.5.0. Pour en savoir plus, consultez la version 4.5.0.
- Micrologiciel FC : Betaflight_4.5.0_BETAFPVG473, téléchargez le micrologiciel et le fichier de vidage CLI
-
Lien de référence : https://github.com/betaflight/betaflight/releases/tag/4.5.0
Micrologiciel du contrôleur Bluejay
Avec la solution BB51 ESC, le contrôleur de vol sans balais Air est basé sur A_X_5_96KHz_V0.19.hex pour le matériel BB51 Bluejay, il prend en charge D-shot300, D-shot600 et même le filtrage RPM dans Betaflight, offre une fréquence PWM fixe de 24 KHz, 48 KHz et 96 KHz pour les options et des mélodies de démarrage personnalisées.
NE flashez PAS le firmware avec un intervalle plus court, sinon, il y aura un certain risque de calage et de brûlure du contrôleur de vol.
- Configurateur ESC : https://preview.esc-configurator.com/
- Télécharger BLHeliSuite16714903
- Téléchargez le firmware Bluejay ESC. Veuillez choisir A_X_5_96KHz_V0.19.hex

Connexion d'un RX/VTX externe
Veuillez noter que l'UART2 est connecté au VTX par défaut. Ce FC réserve 3 ports série complets et fonctionnels qui peuvent être utilisés pour des récepteurs CRSF/SBUS externes, GPS, HD VTX ou d'autres périphériques série. Vous pouvez vous référer aux images ci-dessous.
Attention
- Puissance VTX : une puissance VTX plus élevée consomme plus d'énergie et génère plus de chaleur, réduisant ainsi le temps de vol. Pour une meilleure durée de vol dans les scénarios en intérieur, utilisez une puissance de 25 à 100 mW.
- Câblage du moteur : seule la soudure est prise en charge pour le câblage du moteur sur la commande de vol. Évitez de brancher les bornes.
- Antenne VTX : connectez et installez l'antenne de transmission d'image avant de mettre sous tension la commande de vol. Vous pouvez également régler la puissance de transmission sur 0 pour éviter tout épuisement.
Pièces recommandées
- Drones : Air65, Air75
- Cadres : Air65, Air75, Meteor65, Meteor65 Pro, Meteor75 Pro
- Moteurs : 0702/0702SE, 0802/0802SE, 1102
- Récepteur : Récepteur ELRS Lite, Récepteur ELRS Nano
Emballer
- 1 * Contrôleur de vol sans balais à air
- 1 * Antenne 2,4 g (version 5 en 1 uniquement)
- 1 * Adaptateur Type-C vers SH1.0
- 1 * Câble adaptateur SH1.0 4 broches
- 1 * Antenne VTX 5,8 g
- 1 * Câble BT2.0 U Whoop Pigtail | 40 mm
- 4 * Vis autotaraudeuses M1.4*4
-
4 * Balle absorbant les chocs
Remarque : la photo de l'emballage ci-dessous est la version 4 en 1.
Remarque : la photo de l'emballage ci-dessous est la version 5 en 1.